2.3、技术特点:
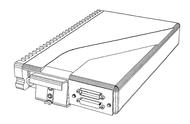
(1)机械特性(如图所示):

整体尺寸:
宽度: 127.8 mm
高度: 195.1 mm
深度: 444 mm
重量: 大约8 kg
(2)电气特性
电源供应 消耗电流
115 V 400Hz 网络 1 : 小于 35 W
115 V 400Hz 网络 2 : 小于 50 W
26 V 400Hz 网络 1 : 小于 3 W
26 V 400Hz 网络 2 : 小于 15 W
28 V DC 基本的 1 : 小于 2 A
28 V DC 第2路 1 : 小于 2 A
(3)技术特点
- 带有姿态的引导和存储标题引用。
- 自动修剪与螺距和滚动阈值。
- 通过驱动踏板在偏航中进行透明引导。
- 透明的驾驶在俯仰和滚动通过人工操作,没有失去参考,但与自动互动。
- 改变姿态的操作-修剪,操作-操作杆脱离。
- 速度大于110公里/小时的自动转弯协调。
- 气压或空速稳定的螺距。
- 内置安全系统的电路和自动修剪监测。
- 从控制点触发的自动定性测试过程。
- 串行控制的整体机械提供了高效、稳定的试验,并保证在故障时手动覆盖,在3秒内最大。
- 伺服放大器在一秒故障(一个通道接合)后饱和获得的每个通道的权限保证手动覆盖在最大1.5秒内。
- 最大纵倾执行器工作时间:
俯仰每秒2.3%的控制。
滚动每秒3.5%的控制。
2.4、155D自驾计算机结构概述(如图所示):

A、外部描述
计算机外部采用矩形形状的单元,两个CAMLOC类型的手柄(1)连接到前窗格用于安装,并将其锁定到其支架上,与前窗格粘合:
- 装饰板(2)。
- 名称牌(3)。
- 修改板(4)。
标签粘在上表面,指示直升机的前进方向和速率陀螺偏航轴。
后窗格具有连接到其他安装设备的连接器,由3个连接器组成,从上到下:
- 40针接头PH(5)。
- 67针接头PM(6)。
- 67针接头PB(7)。
电气安装部分显示了连接器引脚上电压和信号的类型和方向。
B、内部描述
两个可移动的侧板(9),每个面板由16个螺钉连接,一侧提供对各种插件卡的访问,另一侧提供对互连电路的访问。
插件卡分两级设置,它们在套管(10)和隔板(11)的轨道上滑动,它们的连接符号标记在分区(11)上。 它们是:
- PL2(12):电源1(ALS)
- PL3(13):滚动同步通道1延迟(ROLL同步1)。
- PL4(14):滚动稳定通道1节(ROLL稳定1)。
- PL5(15):俯仰同步通道1延迟(P ITCH同步通道1)。
- PL6(16):俯仰稳定通道1档(俯仰稳定1)。
- PL7(17):YAW 1同步延迟(YAW 1)。
- PL8(18):YAW 2同步延迟(YAW 2)。
- PL9(19):偏航引航器(YAW PILOTING)。
- PL10(20):俯仰、偏航、横滚匹配延迟(俯仰、横滚、航向匹配)。
- PL11(21):俯仰、横滚、偏航通道1伺服控制放大器(PITCH ROLL YAW 放大器)。
- PL12(22):滚动自动修剪控制(ROLL TRIM)。
- PL13(23):俯仰自动修剪控制(PITCH TRIM)。
- PL14(24):TRIM监控(TRIM监控器)。
- PL15(25):俯仰辊偏航电路监测器。
- PL16(26):开关卡(开关)。
- PL17(27):接合逻辑延迟(ENGEMENT LOGIC)。
- PL18(28):电源2(ALS)。
- PL19(29):航向阻尼器延迟( YAW DAMPER )。
- PL20 (30):俯仰辊偏航通道2伺服控制放大器(PITCH ROLL YAW AMPLI FERS)。
- PL21(31):横滚稳定通道2(横滚稳定2)。
- PL22(32):滚动同步通道2延迟(ROLL同步)。
- PL23(33):俯仰同步通道2(平同步同步通道2)。
- PL24(34):俯仰稳定通道2节(俯仰稳定2)。
- PL25(35):一般步骤修整预控制延迟(TRIM预控制)。
这些卡的连接器插入安装在互连电路刚性侧部分(36)上的插座,该电路包括一个刚性后部(37),支持开关电路的各个部件。 并连接到连接器PH(5)、PM(6)和两个刚性部分通过柔性电路(38)连接在一起。
在套管的下部和后部是:
- 供电变压器T1(39)和T2(40)。
- 支撑偏航率陀螺仪(41)和横向加速度计(42)的单元。
- 通过连接器P26(43)连接到互连电路。
- 电源滤波器(44)、调节稳压二极管MPZ1和MPZ2(45)
- 热敏电阻RH1和RH2连接在隔板(11)下。
3、155D自驾计算机虚拟化仪表试验和故障部件分析:
3.1、概述
本节涵盖通过自动化程序进行的自驾计算机操作测试和监测。
- 这些测试可以确定要从自驾计算机中移除的设备项目的状况,或者在更换有故障的元件后检查正确的装配。
3.2、测试和设置操作条件
测试应按照给定的顺序进行。 如果在以前的操作中已经可以检测到,则特定故障的原因将不会出现在图表中。 除非另有规定,测试和设置是在正常操作条件下进行的。
A、环境条件:
在760毫米汞柱的压力下,在25°C的温度下,在相对湿度为85%的条件下。
B、位置:
测试和设置在正常操作位置与单元一起执行。
4、测试AP155D自驾计算机虚拟化仪表试验和和故障隔离:
4.1、所需的设备和产品.:
(1)工具
- 控制盒单元SFIM P/N418-00453-100或其模拟器。
- 高阻表。
- AP 155D()()()自驾计算机虚拟化仪表试验器。
(包含:电压表、示波器、测高仪、温度计等虚拟仪表)
- 温度传感器。
- 飞行模拟器。
- 耦合模拟器。
- 巴兰(Baran)模拟器。
- 同步信号模拟器26V 400Hz与115V 400Hz。
- 电阻1K ohm /- 1% 1/4W伺服阀模拟。
- 电阻15K ohm /- 1/4 W比较器负载.。
- 电阻56欧姆 /- 5% 7W蜂鸣器阀门模拟。
- 旋转台WURTZE l度/100精度。
(2)可用同等产品代替所列产品。
4.2、初步步骤。
(1)绝缘测量。
在没有安装过滤器的情况下,检查连接到直升机布线的连接器PH、PM和PB的绝缘电阻,穿过连接的引脚和计算机外壳接地,电阻应在50V DC时大于50M ohm.。
(2)执行。
个别的自驾计算机测试程序需要一个附加测试设置和以下模拟器或它们的等效设备,测试设置允许自驾计算机连接到各种模拟器和电源网络,并包括检查所需的测量点。
(a)、从控制器P/N SFIM 418-00453-100或418-00453-200或从其它模拟器进行的控制;但测试输入需要使用模拟器,
(b)、稳定输入模拟器(垂直陀螺仪、陀螺磁罗盘)是同步发射机,相位为26V 400Hz,115V 400Hz网络使用梯度为200mV rms/度,热点(S1=X)冷点(S3=Y)。
(c)、输出模拟器是伺服阀的1Kohm /- 1% 1/4W电阻和蜂鸣器阀门的56K ohms /- 5% 7W电阻。
(d)安装或不安装直升机逻辑功能(开关、按钮、指示灯等)的飞机模拟器。
(e)、由发电机组成的耦合模拟器用于应用逻辑信号( 27V或 15V)和直流或交流模拟信号(在 /-15V范围内)。
(f)、Baran(空速和压力)模拟器,有两个相互补充的输出,用于偏差和集成。
梯度:海拔50 mV/英尺=1.35 V/mbar;35V/mbar;速度400 mV/ft
动态:高度150 ft;速度15 kt。
备注:对于所有相同的设备,应用要点或测量要点都是根据描述的,作为引脚的辅助旋转接头探测器的识别:
检查:H-25(H):引脚25连接器PH(热点)。
M-32(C):针32连接器PM(冷点)。
(3)供电:
计算机通常由飞机中的两个独立网络提供;相应的输入通过跳线成对地连接到设置。
网络1: 消耗电流低于
适用范围: 115V 400Hz, 跨越 M-5(H)和M-4(C) 之间 35 VA
26V 400Hz, 跨越 M-6(H)和M-4(C) 之间 3 VA
27V DC 跨越 M-3(H)和M-4(C) 之间 0.2 A
网络2:
适用范围: 115V 400Hz 跨越 B-5(H)和B-4(C) 之间 35 VA
26V 400Hz 跨越 B-6(H)和B-4(C) 之间 15 VA
27V DC 跨越 B-3(H)和B-4(C) 之间 0.2 A
网络1和2的115V 400Hz和26V 400Hz电压消耗必须保持小于整个测试中指示的值。
4.3、测试程序:
自驾计算机连接到"机载电子设备AP 155P()()()自驾计算机虚拟化仪表试验器"和相应的模拟器。,对于增益、峰值限制和同步时间测量,M-30、B-14和B-39(连接参见引脚分配),考虑到接合,在第二次线路维护的框架内说明故障的原因。
测试中使用的缩写: /- 加或减
<小于
>大于
信号地:
为了简化操作,目前在M-14 这种冷测试点使测量更容易,信号地利用点是非特异性的,也存在于H-38,参见飞机布线图。
5、测试步骤:
5.1、电源检测:
电源检测虚拟化仪表检测屏幕如下图所示。

检测前首先要将屏幕屏幕上方的" 28V"、"26V 400Hz"、"115V 400Hz"、" 15V"、"-15V"5种试验器中工作电源监测部分打开,这五种电源监测是监测的给"机载电子设备AP 155P()()()自驾计算机虚拟化仪表试验器"供电的工作电源,每一路工作电源均有电压超出上限或下限报警控制电路。