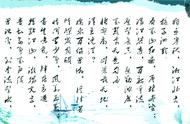
图 15. (a)科里奥利加速度;
(b)微机械加工制备的振动环结构;
(c~f)加速度对环的振动模式的影响
为了使谐振器正确运作,必须以使其尽可能自由振动的方式进行支撑。感应组件示于图15b。谐振器包含一个6mm的硅环,由八个放射状分布的柔性轮辐支架支撑,轮辐支架固定在10×10mm的支撑框架上。带电导体只在上表面淀积和图形化制备,用于导线键合的引脚位于外支撑框架。
芯片经阳极化键合至与硅热匹配的支撑玻璃结构。有八个完全相同的导电回路,每个遵循的路径为:连线引脚-沿支架的长度-绕过环的1/8部分-沿下一个支架的长度-下一个连线引脚。这样每个支架包含两条导线,各在相邻回路,此外还有位于前两条导线之间的第三条导线,用于使电容耦合最小化。谐振器可由任何合适的换能器激发进入振动。例如借助于光、热膨胀、压电、静电或电磁等各种效应都能起作用。激发作用可加至携带谐振器的支撑结构,或直接加至谐振器本身。其基本振动模式在14.5kHz。
图15c~f表示直线加速度和角加速度对谐振器的影响。图15c表示无加速度条件下的侧视图,图15d表示z轴直线加速度的影响,图15e表示围绕y轴的角加速度的影响,图15f表示围绕x轴的角加速度的影响。因为环的位置相对于框架发生改变,所需要的就是与位移相结合的检测变换器,以探测谐振器的特定移动。举例来说,对谐振器振动的感应可由工作于电磁式、电容式、光学式、压电式的变换器实现,或利用应力计实现。这里介绍的这个特殊设计中,利用了带有磁场的图形化制备的导电回路实现的电磁式拾波,该磁场垂直于环的平面。由钐钴磁铁产生磁场,整个结构则封装在标准的IC圆形密封金属壳内。
8. MEMS触觉传感器
微型触觉传感器是机器人领域特别急需的产品,该领域需要好的空间分辨率、高灵敏度和宽的动态范围。硅的塑性形变特性可用于制造具有力学回滞的阈值式触觉传感器。在一种设计中,利用了经晶片键合形成的密闭空腔中封存气体的膨胀,使在空腔上键合形成球状盖子的薄硅膜发生塑性形变。图16所示的结构由硅晶片的微机械加工技术制造。在常规室温和高于临界力时,上电极会向下弯曲,与下电极接触。

图 16. 微机械加工制造的带有俘获气体的硅阈值开关
试验已表明,这种开关在接近13psi压力的闭合动作时具有大约2psi的回滞。开关的闭合电阻为10kΩ量级,对于超低功耗电路通常已足够低了。

图 17. 真空二极管式力传感器原理图
另一种设计中,微型空腔内是真空而不是压缩气体。示于图17的这种传感器具有硅真空结构,带有冷场发射阴极和可动的隔膜阳极。阴极是一个尖锐的硅尖端。在尖端和阳极之间施加正电势时,其间产生电场,如果电场强度超过5×107V/cm,电子可经隧穿从阴极内部到达真空中。尖端的场强和电子发射的数量(发射电流)由阳极电势控制。施加外力时,阳极向下弯曲,因而改变电场和发射电流。
发射电流可通过阳极电压V由下式表示

(13)
其中a和b是常数,β是尖端的几何因子,取决于阳极和阴极之间的距离。要获得较好的灵敏度,可把尖端做成具有大约0.02μm的曲率半径。
9. MEMS压阻式压力传感器
要制造压力传感器,需要有两个基本部件。它们是已知面积为A的平板(膜),和对施加的力F作出响应的探测器。这两种部件都可由硅制造。硅膜压力传感器包括作为弹性材料的薄硅膜,和经由杂质扩散进膜制成的压阻测量电阻。多亏了单晶硅的杰出弹性特性,即使在强的静态压力下,也几乎不会有蠕变和迟滞发生。硅的应变系数比薄金属导体大很多倍。通常把应变测量电阻做成惠斯登电桥连接。这种电路的满量程输出在几百毫伏量级;因而需要信号调节器把输出转换成可接受的规格。另外硅电阻表现出很强的温度敏感性,所以需要或者把压阻做成带温度补偿的,或者信号调节电路包含温度补偿部分。
施加压力至具有初始电阻R的半导体电阻时,压阻效应导致电阻值的变化∆R: