欢迎引用
[1]刘昕卓,苏成利,施惠元,彭博,李平.时变轨迹下工业过程鲁棒模糊预测控制[J].自动化与仪器仪表,2022,No.275(09):16-21.DOI:10.14016/j.cnki.1001-9227.2022.09.016.
作者:刘昕卓,苏成利,施惠元,彭博,李 平
( 1. 辽宁石油化工大学信息与控制工程学院
2. 东北大学流程工业综合自动化国家重点实验室
3. 辽宁科技大学电子与信息工程学院 )
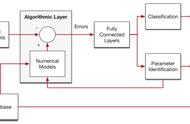
摘 要 :针对具有不确定性、外界未知干扰和跟踪轨迹变化的非线性工业过程 ,提出一种时变轨迹鲁棒模糊预测 控制方法 。该方法将非线性工业过程根据模糊规则表示为 Takagi-Sugeno(T-S)模糊模型 ,并扩展输出跟踪误差到模 糊模型中得到新型多自 由度状态空间模型 。针对扩展模型设计控制器 ,并给出基于线性矩阵不等式形式的稳定性充 分条件 ,通过求解稳定性条件中参数计算对应子模型的控制律 ,并根据当前时刻的系统状态确定每个子模型和控制 律的权值 。同时 ,由于在实际生产过程中被控变量需要根据外界变化来实时调节 ,在设计控制器时充分考虑跟踪轨
迹变化的影响 。在啤酒发酵罐温度系统仿真研究结果表明设计的控制器能够满足控制需求 ,保证系统的稳定性和最 优性能。
关键词 :时变轨迹;鲁棒模糊预测控制 ;非线性;线性矩阵不等式 ;干扰






(来源: 自动化与仪器仪表 2022年第9期)
关注我的你,是最香哒!
,