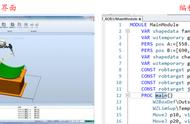
很多时候,仿真人员都希望机器人的示教点位坐标数据能够从外部导入ROBOGUIDE软件,比如机器人点焊焊点坐标数据。针对这种需求,ROBOGUIDE软件也集成了相应的功能,那就是目标点的导入与导出。
ROBOGUIDE软件的目标点功能不仅支持在软件中创建目标点,还支持目标点的导入与导出,支持导入与导出的目标点文件均为CSV格式,并且导入与导出的目标点坐标数据都是以仿真环境的世界坐标系为参考对象(坐标原点)。
目标点坐标数据导出操作目标点坐标数据要想成功导入,对于数据文件是有一定的要求的,比如坐标数据小数点位数、各坐标数据之间的间隔符以及数据文件格式等。
要想获取一个标准的目标点坐标数据模板,最简单的方法就是从ROBOGUIDE软件中导出一个目标点坐标数据文件。
参考上一期发布的文章《ROBOGUIDE软件:使用目标点自动生成机器人运行程序》中目标点创建方法,随意创建若干个目标点。
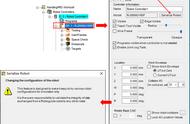
左侧Cell Browser浏览树中,右击目标点“Targets”,在弹出的快捷菜单中选择“Export Point Data”。

在弹出的CSV File Location对话框中,选择目标点坐标数据文件的保存路径,输入文件名称,然后点击“打开”按钮,目标点坐标数据文件就会被导出并保存。

导出的目标点坐标数据文件为CSV格式,使用Excel电子表格能够将其打开,打开后可以看到目标点的坐标数据。

表格中每一行的六个数据就是目标点的坐标数据,即左侧的序号1、2、3、4…对应ROBOTUIDE软件中的目标点T1、T2、T3、T4…,上方A、B、C、D、E、F对应目标点坐标数据的X、Y、Z、W、P、R。
制作目标点坐标数据文件时,只需要按照表格中所示的数据格式,依次替换每一个坐标数据,然后将数据文件保存为CSV格式即可。
目标点坐标数据导入操作左侧Cell Browser浏览树中,右击目标点“Targets”,在弹出的快捷菜单中选择“Import Point Data”,弹出Import Point Data对话框。