图4:经过过滤及补偿算法后的轮胎轮廓曲线
(3)计算最高点
在图3的基础上,从距离数据上筛选出最高点。

图5:提取到最高点后的轮胎轮廓曲线
图中的X号标志出轮胎的最高点,这个点成为前束及外倾的计算依据。
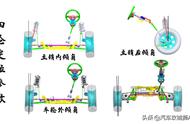
3.4前束、外倾的计算
(1)计算前束
假设: L:高点到激光头的距离,D:轮胎测试圆直径,Toe:前束,Cam:外倾。“前”、“后”(9点钟、3点钟)指前后激光传感器。则:
每次采集后计算的前束值为:
Toe0=arctg[(L前-L后)/D] (1)
如果方向盘转角θ不为零,则还要根据传动比λ把方向盘对前束的影响折合成一个角度θ0,总前束的计算要把这个角度减掉。即:
θ0=θ×λ (2)
实际前束为:
Toe =Toe0-θ0 =Toe0 -θ×λ (3)
(2)计算外倾
假设3、9点钟传感器测量到的轮胎高点连线的中间点平均距离为L下:
Cam=arctg[2(L上-L下)/D]= arctg{2[L上-(L前 L后)/2]/D} (4)
其中,L下=(L前 L后)/2
在工人调整时,整个测量过程是动态的。测量结果可以动态显示在屏幕上,操作者通过屏幕显示把握调整状态,直到调整合格为止。
4路试跟踪情况及原因分解
为了找到问题的症结,我们跟踪测试了上千台车,并现场记录了相关数据。最终得出的车间反应为跑偏的问题主要有如下几种:
(1)路试中车辆行驶方向盘扶正后,车辆行驶中跑偏。我们的国家标准为0.5米/百米,实测结果超过这个标准,实际约2米左右。
(2) 车辆行驶不跑偏,但方向盘偏,离散范围为1.5-3.5度。稳定时应在2度以内,工艺控制为3度。
(3)同一台车路试后重复测量,前后数值不一致。
(4)行驶不跑偏,但踩刹车时发生跑偏。
(5)在调整正常允许范围内调整不到合格区段。
这些问题都有一定比例,特别是第1、2种情况,占据全部问题车辆的80%。但工艺、质量、车间等各部门普遍简单判定为设备问题。因此需要甄别,我们的看法是:
(1) 第1、2个问题可能跟设备有关。
(2) 第3个问题可能反映出产品自身及前期装配过程中产生装配间隙,路试后造成重复测试不一致。
(3) 第4个问题明显是两侧刹车间隙不同造成的,也反映为设备问题。
(4) 第5个问题应该是后桥悬架装配时,装配调整不合适,造成后桥调整中心和四轮定位设备调整中心偏离过大。
在上千组跟踪数据记录面前,判别思路变得相对清晰起来。
5造成四轮定位跑偏的相关原因分析
车辆出现跑偏是四轮定位工序经常遇到的一个异常棘手的问题,产生问题的原因非常复杂。由于它和整车质量息息相关,探讨它有其特殊的重要意义。
经过一系列分析、检修、调整、试验,认为如下因素会对车辆跑偏造成影响:
(1)四轮设备的标定:如果设备基准漂移或变化,会产生批量跑偏,多数跑偏可以通过重新标定四轮定位仪来解决。
(2)后悬架分装机:该设备用于后桥悬架装配及调整,控制不好,会对跑偏产生影响。即出现上面的第5种情况。这时,可以检查其状态或重新标定。
(3)车辆后悬系统设计问题:MAZDA的车辆也有少量跑偏现象,每天都有几台。他们认为是后悬系统的设计问题,目前,MAZDA产品部门正在研究。
(4)传感器信号通道故障:可以通过监视成像图象来比较。通过对十二个传感器图形的比较,可以找到传感器是否有损坏。
(5)对中器问题:厂家认为,对中器对调试影响很大。如果力量过大,会使车轮变形,造成调整误差。最合适的压力在50公斤左右。
(6)轴距问题:如果设备轴距不合适,加上我们的车辆轴距波动较大(10毫米),可能造成浮动机构和设备固定结构的干涉,使调整结果受到影响。
(7)环境干扰问题:环境光线对设备会造成影响。我们的设备在下午时,环境光线很强,是否会有比较大的影响有待观察。必要时,可以采取遮光措施。
(8)辊子的中心高:左右辊子中心高是否在一个水平上将对测量结果产生一定影响。
(9)浮动机构:是否有间隙,旋转是否灵活。
(10)轮胎压力:轮胎压力必须均衡,否则也会影响跑偏。
(11)整车装配间隙问题:MAZDA也认为悬架系统装配间隙偏大,这样就能解释经过路试的车辆回来与路试前一致性不好的问题。这可以通过适当加长四轮调整前的震动格栅的方法来解决。
(12)方向盘水平:方向盘的调整基准如果不正确,对整车导向系统会造成不良影响。这时,要重新校正方向盘倾角仪。
(13)控制标准问题:我们的国家标准比日本更加严格。比如跑偏距离,我们的国标是每百米允许0.5米,而日本是2米。标准上比较大的差异,是形成产品设计控制不严的一个原因。而在我们路试中可能反馈为跑偏。
(14)左右置方向盘对调问题:日本MAZDA产品设计是右置方向盘,而我们改为左置结构。大家都认为会带来影响,但影响多大有待确认。
(15)推进角问题:MAZDA推进角设计偏大,认为会有轻微影响。
(16)基准架与标定方法:基准架如果不出现磕碰,一般不会对跑偏构成影响。它是通过三坐标测量的,厂家没有向我们交代过测试基准架的手段和方法。目前我们使用的宝克公司设备测量基准架一共要测算72项数据,并输入到计算机系统中。
至于实际标定,我们的标定只标零度。而目前比较合理的标定形式,除零度外,还标1度或者3度、5度等。这样实际上是既标零点,也标增益,更有利于提高标定精度。
(17)车体高:车体高度对跑偏有轻微影响。前期底盘加高后,跑偏有一定程度的改善。
(18)测试方法问题:MAZDA公司要求调整后轮时,驾驶室不能上人,调整前轮时,驾驶室要有人。这样做主要是考虑配重问题,他们认为这样会对调试结果有影响。我们的工艺则没有这样的要求,但基本也能控制在公差范围内。
以上因素,都和车辆跑偏有一定关系,因此,我们要和工艺、质量保证部门共同探讨车辆跑偏的可能原因,以期得到正确的结论。
6我们实际采取的措施
结合以上分析,我们采取了如下措施:
(1)检查更换激光传感器。
经过测试和图象观察,发现一个传感器(LF)的成像只有两个点。但设备进厂以来一直是这样,而且长期生产。我们认为它是不正常的,可能逐步质变,而成为跑偏的主要原因。
下图是该传感器的图形。

图6:左前(LF)传感器成像
我们更换了该传感器,发现跑偏率明显下降。
(2)调整和标定后悬架装配机
我们对该设备的机械装夹系统进行了精度调整,并对其精度进行了标定,控制了悬架调整的偏差。使得悬架调整中心和四轮定位中心一致性获得改善。从而改善了整车方向性调整。
(3)对设备机械结构进行调整
我们对四个浮动盘进行了清理和检修,同时对其水平状态进行了调整,使得设备基本精度得到改善。其中,还发现一个浮动棍子的下支撑轴承出厂时装配反,我们进行了改装。
(4)电气系统传输线路检修
我们发现,部分电子线路板清洁状况不好,我们进行了清洗。同时,对传感器、AD板、计算机系统所有的接口进行了紧固处理。处理结果发现,设备重复测试精度有所提高。
(5)增加自然光线遮护
生产时,经常发现跑偏最严重的时候,都是下午4点前后。这明显不能从设备角度简单理解这个现象。鉴于激光系统的特殊性,我们怀疑可见光波段对激光测量系统有干扰。于是,我们增加了挡光设施,特别是在设备标定时,严密进行遮挡。结果发现,跑偏现象有改善趋向,而且,和时间不再形成关联关系。
(6)坚持周期性的标定
我们缩短了标定周期,由厂家推荐的3个月一次,缩短到1个月两次。从而有效地控制了基准的飘移。
(7)其它措施
我们还协同工艺等部门,进行了控制标准、产品自身等原因的探讨和修正,及加长震动格栅等,也取得一定效果。
7激光传感器图象监视及分析方法
经过对厂家的咨询和我们的摸索,我们总结了一套判别激光系统异常的方法,对寻找激光测量状态对跑偏的影响有重要意义。这里总结出来,便于维修人员借鉴。
7.1监视方法
对四轮定位仪的12个激光传感器,可以动态监视其成像图像。这一功能对维修有重要意义,我们可以根据图象的比较来判定传感器的好坏。
在生产调整、传感器标定等动态或静态过程中,我们都可以监视传感器图象。方法是:
(1) 正常工作界面下,在计算机键盘按ESC。
(2) 用左右箭头键选择DISPLAY(显示)菜单,回车。
(3) 选取CAMERA STATE(镜头状态)命令,回车。
(4) 用上下箭头选取ON,回车。
(5) ESC退到DISPLAY(显示)子菜单下。
(6) 用上下箭头选取CAMERA GRAPHS(镜头图像),回车。
(7) 用上下箭头选取:
ALL CAMERAS:所有镜头。
LF FRONT CAMERA:左前前镜头。 LF TOP CAMERA:左前顶镜头。
LF REAR CAMERA:左前后镜头。 RF FRONT CAMERA:右前前镜头。
RF TOP CAMERA:右前顶镜头。 RF REAR CAMERA:右前后镜头。
LR FRONT CAMERA:左后前镜头。 LR TOP CAMERA:左后顶镜头。
LR REAR CAMERA:左后后镜头。 RR FRONT CAMERA:右后前镜头。
RR TOP CAMERA:右后顶镜头。 RR REAR CAMERA:右后后镜头。
之一,再回车。屏幕显示对应项目图象。
(8) 观察图象形状是否正常。观察过程中,可以用手去遮挡传感器发射与接收镜头,观察图象变化。以此可以判断激光头和线路好坏。
(9) 观察结束后,用ESC退到DISPLAY(显示)子菜单下。
(10) 选取CAMERA STATE(镜头状态)命令,回车。
(11) 用上下箭头选取OFF,回车。(实际上,置于ON也不影响生产调试。标定时,此项必须处于ON。)。
(12) 用ESC退到DISPLAY子菜单下。
(13) 选取SET DEFAULT(选择缺省值),回车。
(14) 选择YES,回车。
(15) ESC退到主菜单。
(16) 左右箭头移动到QUIT菜单命令,回车。
(17) 上下箭头选取RETURN,回车。系统进入调整生产画面。
用上述观察传感器图象的方法,可以动态监视标定架、车轮及随机物品的图象。籍此可以判断系统是否正常及问题类型。
7.2标定样架的正常成像图
下面是传感器标定时典型的标定架正常成像图:

图7:标定架的成像图
7.3标定过程异常成像图及其分析
当对传感器进行标定时,如果出现传感器图象异常报警,可以查询传感器图象,并按照如下表格中的方法排除。只有在没有任何异常成像报警的前提下,标定才能成功。